Description:
Explore the intersection of deep learning and control theory in autonomous systems through this 49-minute lecture by Claire Tomlin from UC Berkeley. Delve into the challenges of efficiently navigating an autonomous system using a monocular RGB camera in unknown environments. Examine success rates, control profiles, and comparisons with geometric mapping-based approaches. Gain valuable insights into safe learning for dynamics and control, and understand key lessons learned in the field of perception for robotics. Part of the Frontiers of Deep Learning series at the Simons Institute, this talk offers a comprehensive perspective on the application of deep learning techniques in autonomous system perception.
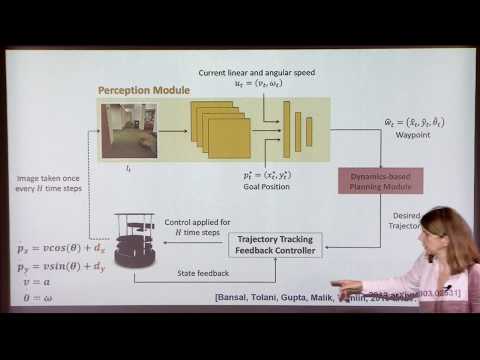
Using Deep Learning for Perception in Autonomous Systems - A Perspective from Control Theory
Add to list
#Computer Science
#Deep Learning
#Engineering
#Control Theory
#Artificial Intelligence
#Autonomous Vehicles
#Autonomous Navigation