Description:
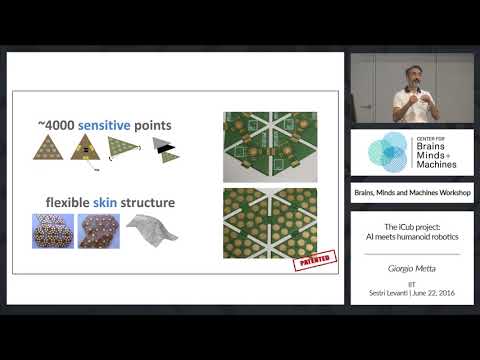
Explore the intersection of artificial intelligence and humanoid robotics through the iCub Project in this 31-minute lecture by Giorgio Metta from IIT. Delve into the design, features, and capabilities of the iCub humanoid robot, including its tactile sensors, interaction capabilities, and advanced vision systems. Learn about the project's experiments in bounded computation time, temperature compensation, and balancing. Discover how the iCub tackles challenges in image classification, speech recognition, and adapts to various conditions of acquisition. Gain insights into the robot's performance across multiple tasks and understand the analysis of results. Finally, get a glimpse into the future of the project with discussions on new materials and potential advancements in humanoid robotics.
The ICub Project - AI Meets Humanoid Robotics
Add to list
#Engineering
#Robotics
#Human-Robot Interaction
#Computer Science
#Artificial Intelligence
#Speech Recognition