Description:
Explore the fundamentals of PID (Proportional, Integral, Derivative) controllers in this comprehensive 22-minute video tutorial. Delve into control theory concepts, starting with open-loop and closed-loop systems, before examining each component of a PID controller. Learn how proportional, integral, and derivative terms work together to achieve desired outputs in various applications, including cruise control systems. Understand the differences between overdamped, underdamped, and critically damped responses, and discover how to implement PID controllers in software. Gain insights into tuning PID controllers and explore real-world use cases. The tutorial includes code examples and product recommendations to help you apply this knowledge in practical projects.
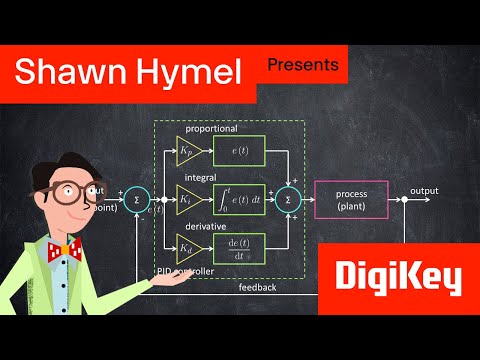
What Is a PID Controller?
Add to list
#Engineering
#Electrical Engineering
#Control Systems
#PID Controllers
#Programming
#Software Development
#Control Theory
0:00 / 0:00