Description:
Explore the intricacies of quaternions, axis-angle representation, and Euler parameters in this comprehensive lecture on space vehicle dynamics. Delve into the axis-angle representation of rotation based on Euler's rotation theorem, and understand how quaternions, specifically Euler parameters, relate to the four elements of a quaternion derived from axis and angle. Learn about the rotation matrix (direction cosine matrix) and its parameterization using Euler angles and axis-angle pairs. Discover why the 4-dimensional Euler parameters offer advantages over other representations due to their non-singular nature and well-behaved kinematics differential equation. Follow along with MATLAB tutorials demonstrating practical applications of these concepts, including calculations for axis-angle representation, conversion between axis-angle and rotation matrix, and Euler parameters to rotation matrix transformations.
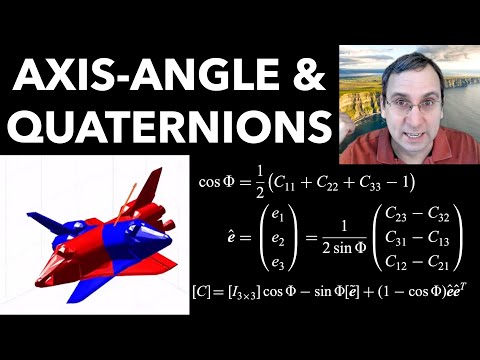
Quaternions for Rotation, Axis-Angle, Euler Parameters - MATLAB Examples - Rodrigues Rotation Formula
Add to list
#Engineering
#Aerospace Engineering
#Programming
#Domain-Specific Languages (DSL)
#MATLAB
#Mathematics
#Quaternion
#Spacecraft Dynamics
0:00 / 0:00